
一、一个颠覆性的“败家子”实验
前几天,我刷到一个视频,差点把咖啡喷在屏幕上。
一群大学生,拿着一个看起来像玩具车底盘的东西,在办公室里左拐右绕,完美避开所有纸箱和障碍。关键是,这辆小车的“大脑”,不是我们熟悉的树莓派,也不是什么工控机,而是一块成本只要20多美元的ESP32单片机。
![图片[1]-这所大学用20美元的ESP32“小芯片”搞自动驾驶,结果让所有人傻眼-寻找资源网](http://img3.seekresource.com/img/373)
没错,就是那种你买智能插座、小夜灯里最常见的那种芯片。
我当时的反应和所有搞硬件的朋友一样:这不可能!绝对又是标题党,或者背后藏了台电脑在无线遥控。
但当我顺着线索,找到女王大学那篇论文和开源代码后,我沉默了。他们不仅做到了,还用一套极其“反常识”的思路,把自动驾驶的门槛,从“极客玩具”直接拉低到了“小学生手工课”的水平。
论文信息
论文标题:
TinyNav: End-to-End TinyML for Real-Time Autonomous Navigation on Microcontrollers
发表日期:
2026年03月
发表单位:
Queen’s University (女王大学)
原文链接:
https://arxiv.org/pdf/2603.11071v1.pdf
这背后,是一场关于“智能”的认知革命。
二、我们都被“复杂”骗了太久
过去十年,一提到机器人自主移动,我们的思维路径几乎是条件反射的:
传感器 -> SLAM建图 -> 路径规划 -> 运动控制。
这套流程逻辑严谨,像一套精密的瑞士钟表。但问题也出在这里——它太“重”了。你需要强大的算力(树莓派起步)、复杂的算法(一堆开源库拼凑)、以及大量的调试(无尽的掉坑与爬坑)。
这就好比,你想从客厅走到厨房倒杯水,却先要求你大脑绘制出全屋的3D点云地图,规划出最优路径,再精确控制每块肌肉的发力。听起来很高级,但效率低得感人,而且对“大脑”(硬件)要求极高。
女王大学的团队问了一个“天真”的问题:为什么不能让机器人像昆虫一样,看见障碍,直接绕开?
他们抛弃了所有中间步骤,玩了一招终极“偷懒”:端到端学习。
简单说,就是只给AI看两样东西:
- “眼睛”看到的(深度摄像头拍的画面)。
- “老司机”这时候会怎么做(人类遥控时打的方向和油门)。
然后告诉AI:“别问为什么,你就学这个映射关系,看见A,你就输出B。”
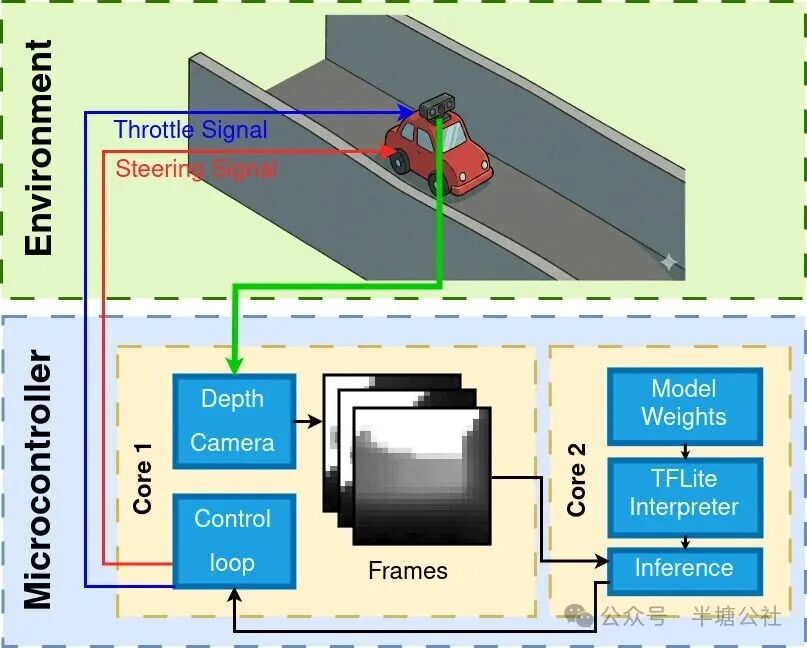
三、在“螺蛳壳”里,做出“道场”的魔法
思路很性感,但现实很骨感。ESP32那点可怜的计算资源(几百KB内存),跑个呼吸灯程序绰绰有余,跑神经网络?听起来像让自行车去拉火车。
他们的工程智慧,在这里体现得淋漓尽致:
- 把“时间”叠起来看 机器人需要知道运动趋势。高端方案用3D卷积或LSTM网络处理视频流,但ESP32扛不住。他们的解决方案堪称“土法炼钢”的典范:把连续20帧画面,像摞煎饼一样摞起来,当成一张有20个通道的超级图片来处理。这样,普通的2D卷积网络就能在分析图像时,顺便“瞟”到不同时间点的变化,从而感知到“我在向前冲”还是“墙在向我靠近”。
- 极致的“瘦身”艺术 最终定型的神经网络,只有2.3万个参数。什么概念?你手机里随便一个美颜APP的模型,都是它的成千上万倍。输入是模糊的24×24低分辨率深度图,经过几层简单的卷积,直接吐出两个数字:左转/右转的角度,和油门的大小。没有一丝冗余。
- 给模型“降维打击” 他们用了模型量化技术,把计算从32位浮点数“压缩”成8位整数。你可以理解为把高清无损音乐转成MP3。结果让人震惊:性能损失不到0.2%,但推理速度飙升,在ESP32上一次决策仅需30毫秒,比人眨眼还快。
![图片[3]-这所大学用20美元的ESP32“小芯片”搞自动驾驶,结果让所有人傻眼-寻找资源网](http://img3.seekresource.com/img/375)
![图片[4]-这所大学用20美元的ESP32“小芯片”搞自动驾驶,结果让所有人傻眼-寻找资源网](http://img3.seekresource.com/img/376)
【这一切的核心,不是算法的胜利,而是“设计哲学”的胜利:在明确且有限的场景下,用最简单的结构,解决最核心的问题。】
![图片[5]-这所大学用20美元的ESP32“小芯片”搞自动驾驶,结果让所有人傻眼-寻找资源网](http://img3.seekresource.com/img/377)
四、它到底有多聪明?结果令人意外
你可能会想,这么小的模型,肯定很“蠢”吧?
实验数据给出了反直觉的答案:
这说明,它没有死记硬背,而是真正学到了一些关于空间和运动的“直觉”。
当然,它有很大的局限性:换个陌生环境、遇到没见过的障碍(比如一只猫)、或者地面打滑,它可能立马就“懵”了。它是个“偏科生”,但在它的“专精领域”内,表现足够惊艳。
![图片[6]-这所大学用20美元的ESP32“小芯片”搞自动驾驶,结果让所有人傻眼-寻找资源网](http://img3.seekresource.com/img/378)
五、给我们的启示:减法比加法更难
这个项目的意义,远不止于一个便宜的自动驾驶小车。
它像一记闷棍,敲在我们这些热衷于堆料、追求“大而全”的工程师头上。它证明了:
- 【很多时候,用户要的不是“全能冠军”,而是一个能把特定事情做到80分的“廉价专家”。】 在工业巡检、农业监测、智能玩具等无数场景中,成本、功耗和实时性才是王道。
- 【AI平民化的关键,可能不在于做出更强的AI,而在于为特定任务设计“刚刚好”的AI。】 TinyML(微型机器学习)的浪潮,正把AI从云端的神坛,拉进我们身边每一个微小的电子元件里。
- 【创新的另一面,是勇敢地做减法。】 敢于砍掉“看起来必需”的模块,直面最原始的需求,往往能开辟一条意想不到的捷径。
下次当你为一个项目焦头烂额,纠结于性能不够时,不妨先问自己:我的需求,真的需要那么复杂吗?有没有一种“愚蠢”但有效的简单方法?
主要参考文献
[1] R. David et al., “Tensorflow lite micro: Embedded machine learning on tinyml systems,” arXiv preprint arXiv:2010.08678, 2021.
[2] Espressif Systems, “Esp-nn: Optimised neural network functions for espressif chipsets,” GitHub repository, 2026.
[3] R. R. Selvaraju et al., “Grad-cam: Visual explanations from deep networks via gradient-based localization,” arXiv preprint arXiv:1610.02391, 2016.
开源代码
看完这个“20美元的自动驾驶”故事,你有什么想法?
- 你觉得这种极致简化的思路,能用在你的行业里吗?
- 如果让你用20美元元预算设计一个智能小装置,你会做什么?
欢迎在评论区畅所欲言! 如果觉得这种“打破认知”的案例很有趣,记得点赞、收藏,并关注我,带你一起拆解更多硬核又有趣的科技前沿。
【技术的未来,往往藏在那些被我们忽略的“简单”里。
来自:半塘公社
原创:半塘公社
看完不过瘾,那就自己发一篇吧!





![表情[nanguo]-寻找资源网](http://www.seekresource.com/wp-content/themes/zibll/img/smilies/nanguo.gif)
![表情[haobang]-寻找资源网](http://www.seekresource.com/wp-content/themes/zibll/img/smilies/haobang.gif)
![表情[shuai]-寻找资源网](http://www.seekresource.com/wp-content/themes/zibll/img/smilies/shuai.gif)
![表情[deyi]-寻找资源网](http://www.seekresource.com/wp-content/themes/zibll/img/smilies/deyi.gif)
![表情[chi]-寻找资源网](http://www.seekresource.com/wp-content/themes/zibll/img/smilies/chi.gif)


暂无评论内容